SLAM/Calibration
[Calibration] Kalibr IMU Calibration
페트론
2020. 4. 23. 19:41
1. Install Kalibr_allen
https://github.com/rpng/kalibr_allan
rpng/kalibr_allan
IMU Allan standard deviation charts for use with Kalibr and inertial kalman filters. - rpng/kalibr_allan
github.com
2. Install Matlab
Install Matlab to ubuntu
3. Recording rosbag of IMU
(1) run your IMU sensor node
$ rosrun mw_ahrsv1 mw_agrsv1
(2) check topic name
$ rostopic list
(3) check topic hz
$ rostopic hz /imu
it's recommended the rate is about 200hz,
but my IMU sensor output is 10hz maximum.
(4) record data using rosbag
$ cd ~/catkin_ws/src/kalibr_allan/data/bags
$ rosbag record /imurecord imu data, recommending time is about 4 hours.
but i did only 5 minutes for breif test.
(5) convert .bag file to .mat file
$ cd ~/catkin_ws/src/kalibr_allan/data/bags
$ rosrun bagconvert bagconvert imu.bag /imu
(6) SCRIPT_allan_matparallel.m
excute matlab and run "SCRIPT_allan_matparallel.m".
before running, change update_rate to value gotten from (3) and "mat_path" to where your .mat file exist.
(7) SCRIPT_process_result.m
excute matlab and run "SCRIPT_process_result.m".
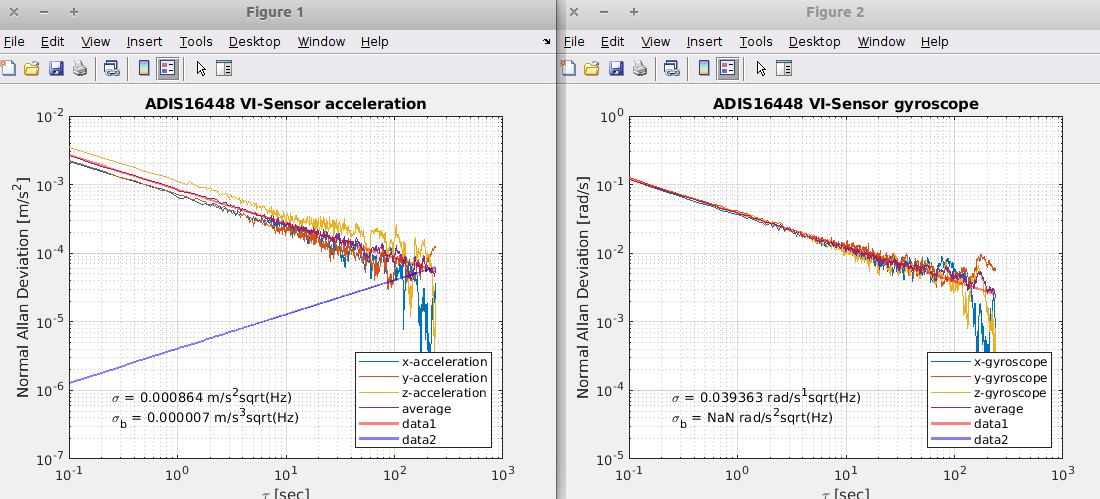

now you can get 4 result data ( i guess there is NaN for gyroscope_random_walk caused by small mount of data)
반응형