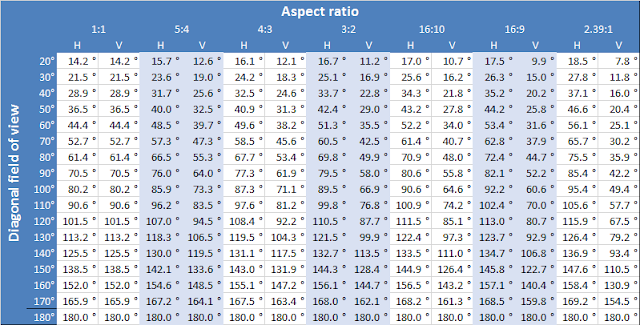
Refferd from Estimate visible bounds of webcam using diagonal fov Converting diagonal field of view and aspect ratio to horizontal and vertical field of view Logitech BRIO Ultra HD Pro Webcam I gotta calculate H, V FOV from Diagonal FOV. and I got Information about diagonal fov and aspect ratio only. so I've calculated it reffed vrguy blog. 1. Given Information (Logitech BRIO Ultra HD Pro Webcam..