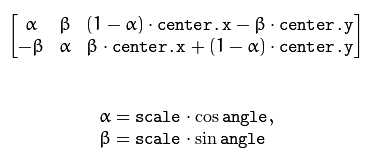
영상의 한 좌표를 중심으로 회전을 시키는 행렬은 식 1과 같다. 식 1은 Homogenous coordinate(동차 좌표)를 이용한 Transformation Matrix(변환 행렬)이다. [2]를 참고하면 이에 대한 이론이 설명되어 있는데, 이를 정리하고자 한다. Homogenous coordinate in Transformation Matrix Why Homogeneous Coordinates? 수학자들은 보통 방정식에서 scaling factors를 제거하기 위해 동차좌표를 사용한다. 동차좌표를 사용하게 되면 행렬 변환을 위한 곱셈 계산이 매우 효율적이게 된다. 동차좌표는 직관적이지는 않지만 그래픽 작업 측면에서 매우 편리하다. 2x2 이동행렬은 존재하지 않기 때문에 동차좌표 시스템을 이용함으로써..